
















 Berita
Berita
Perbezaan antara RTK dan ppk
UAV digunakan secara meluas, dengan kos rendah, multi-tasking, kemampuan manuver yang baik, kecekapan tinggi, dan radiasi rendah. Mereka digunakan secara meluas dalam semua aspek ketenteraan dan awam pengeluaran.
Kerana gps mempunyai ciri-ciri semua cuaca, ketepatan tinggi dan pengukuran automatik, UAV kini digunakan untuk tinjauan dan pemetaan pada dasarnya menggunakan gps untuk penentuan kedudukan dan navigasi. Titik tunggal gps ketepatan kedudukan UAV kawalan penerbanganterlalu miskin. Sebelumnya, sebilangan besar titik kawalan gambar digunakan untuk membetulkan penyelewengan gambar
Namun, di beberapa medan khas (seperti gunung, lembah, sungai, dan lain-lain), sukar bagi petugas lapangan untuk menggunakan kawalan gambar titik. untuk mengurangkan beban kerja, kebanyakan titik kawalan gambar tidak diperlukan, dan perlu untuk meningkatkan ketepatan kedudukan pesawat, RTK teknologi dan teknologi ppk dapat mencapai tahap sentimeter ketepatan.
di bawah ini kita mulakan dari dua prinsip teknikal RTK dan PPK, dan melakukan analisis perbandingan untuk mencari kaedah yang lebih sesuai untuk kedudukan udara gps.
1. Prinsip kerja RTK

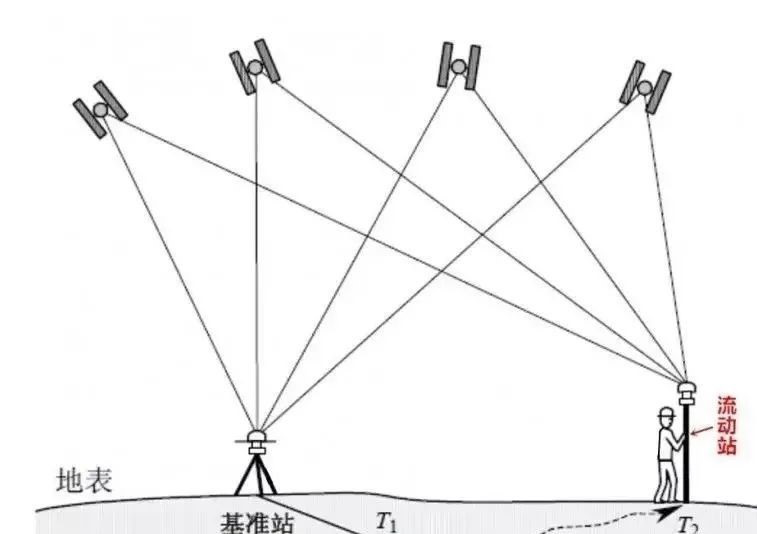
RTK (masa nyata gerakan) sistem pengukuran biasanya merangkumi tiga bahagian: gps menerimaperalatan, sistem penghantaran data dan sistem perisian untuk pengukuran dinamik. The RTK teknologi pengukuran didasarkan pada pemerhatian fasa pembawa dan mempunyai ketepatan tinggi kedudukan fungsi. Teknologi pengukuran pembezaan fasa pembawa dapat memperoleh hasil kedudukan tiga dimensi masa nyata stesen pengukuran dalam sistem koordinat yang ditentukan, dan mempunyai tingkat sentimeter kedudukan ketepatan.
Prinsip kerja dari RTK pengukuran ialah: letakkan satu penerima di stesen pangkalan dan letakkan penerima yang lain di pembawa (dipanggil stesen bergerak ). Stesen pangkalan dan stesen bergerak secara serentak menerima isyarat yang dihantar oleh satelit gps yang sama. Nilai pemerhatian yang diperoleh dibandingkan dengan maklumat kedudukan yang diketahui untuk mendapatkan pembetulan pembezaan gps nilai. Kemudian, nilai pembetulan dihantar ke stesen bergerak satelit awam melalui stesen pautan data radio tepat pada waktunya untuk memperbaiki nilai pemerhatian gpsnya untuk mendapatkan kedudukan stesen masa nyata yang lebih tepat setelah pembezaan pembetulan.
pada masa ini, ketepatan kedudukan kedudukan pengeluar arus perdana RTK boleh mencapai 8mm + 1ppm, dan ketepatan ketinggian boleh mencapai 15mm + 1ppm. terdapat dua kaedah komunikasi utama antara stesen pangkalan dan stesen bergerak: stesen radio dan rangkaian. Isyarat stesen radio stabil, dan jarak penghantaran isyarat rangkaian panjang, dan masing-masing mempunyai kelebihan masing-masing.
Kedua, prinsip kerja ppk
Prinsip kerja ppk (pasca pemprosesan kinematik, dinamik gps pasca pemprosesan pembezaan) teknologi adalah menggunakan penerima stesen pangkalan untuk pemerhatian serentak, dan sekurang-kurangnya satu penerima mudah alih untuk pemerhatian serentak gps satelit. dengan kata lain, stesen pangkalan tetap berterusan. setelah memerhatikan inisialisasi, rover bergerak ke titik seterusnya yang akan ditentukan, dan perlu untuk terus mengesan satelit semasa penempatan semula untuk memindahkan kesamaran satelit. sepanjang minggu hingga waktu yang dijadualkan .
Data yang diterima oleh stesen rujukan dan rover pada masa yang sama digabungkan secara linier dalam komputer untuk membentuk nilai pemerhatian fasa pembawa maya untuk menentukan kedudukan relatif antara penerima . Akhirnya, koordinat stesen rujukan yang diketahui diperkenalkan untuk mendapatkan koordinat tiga dimensi rover.
teknologi ppk adalah teknologi pembezaan dinamik gps terawal (juga dikenali sebagai semi-dinamik kaedah, kuasi-dinamik kaedah kedudukan relatif, kaedah berhenti-dan-pergi )). Perbezaan utama antara dan RTK teknologi adalah bahawa ia mewujudkan penghantaran data masa nyata di stesen pangkalan dan stesen rover ( seperti RTK), tetapi setelah pemerhatian kedudukan, data kedudukan yang dikumpulkan oleh dua penerima gps akan diproses bersama setelah pengukuran untuk menghitung koordinat kedudukan stesen bergerak pada masa yang sesuai. Rover tidak dilarang sama sekali. kelebihannya ialah ketepatan kedudukan tinggi, kecekapan kerja tinggi, radius kerja yang besar dan mudah dikendalikan.
3. perbandingan RTK dan ppk
persamaan antara RTK dan ppk
1. Mod operasi adalah sama. kedua-dua teknologi menggunakan mod operasi stesen rujukan ditambah rover.
2. kedua-dua teknologi perlu diinisialisasi sebelum operasi.
3. kedua-duanya boleh mencapai tahap sentimeter ketepatan.
Perbezaan antara RTK dan ppk
1. kaedah komunikasi yang berbeza. RTK teknologi memerlukan stesen radio atau rangkaian untuk menghantar pembezaan data. teknologi ppk tidak memerlukan sokongan teknologi komunikasi, dan dapat merakam data statik.
2. kaedah kedudukan yang berbeza . Teknologi penentududukan masa nyata yang digunakan oleh RTK membolehkan anda melihat koordinat dan ketepatan titik pengukuran pada rover pada setiap masa; kedudukan ppk adalah pasca pemprosesan kedudukan, dan koordinat titik tidak boleh dilihat di laman web . ia memerlukan pasca pemprosesan untuk melihat hasil .
3. Jejari kerja berbeza. RTK operasi dihalang oleh stesen komunikasi . Jarak operasi pada amnya tidak melebihi 10 km. Mod rangkaian memerlukan kawasan yang diliputi oleh rangkaian isyarat. dengan menggunakan teknologi ppk, radius operasi umum dapat mencapai 50 km.
4. Tahap pengaruh isyarat satelit berbeza. dalam proses RTK operasi, jika ia terletak berhampiran dengan halangan seperti pokok besar, mudah kehilangan kunci semasa dalam operasi ppk, biasanya tidak mudah kehilangan kunci setelah inisialisasi.
5. kedudukan yang berbeza ketepatan. RTK ketepatan satah 8mm + 1ppm, ketepatan ketinggian 15mm + 1ppm ketepatan satah ppk 2.5mm + 0.5ppm, ketepatan ketinggian 5mm + 0.5ppm.
6. kedudukan yang berbeza frekuensi. Kekerapan di mana RTK stesen pangkalan menghantar data pembezaan dan stesen bergerak biasanya menerima 1-2 HZ, dan frekuensi kedudukan maksimum ppk boleh mencapai 50HZ.
perbandingan analisis:
1. Kelajuan terbang drone di udara sangat pantas dan memerlukan kedudukan tinggi frekuensi. navigasi masa nyata RTK teknologi sukar untuk mencapai keadaan ini. ppk menyokong 50HZ kekerapan kedudukan, yang dapat memenuhi permintaan .
2. RTK menyediakan maklumat masa nyata maklumat. ppk dapat menyelesaikan data zaman dalam jangka masa melalui pasca pemprosesan. bukan sahaja kadar tetap dapat ditingkatkan, tetapi ketepatan resolusi lebih tinggi.
3. RTK memerlukan modul komunikasi radio atau rangkaian, tetapi ppk tidak, yang dapat mengurangkan beban drone dan memanjangkan jangka hayat pesawat
4. Jarak pemanduan dari RTK adalah terhad, dan jarak pemanduan ppk boleh mencapai 50km. di kawasan operasi jarak jauh dan berskala besar, terutamanya kawasan tali pinggang, seperti saluran penghantaran kuasa, jalan raya, jalan kereta api, saluran paip minyak dan gas, ppk akan menjadi pilihan terbaik.
Empat, untuk meringkaskan
Walaupun RTK dapat memberikan ketepatan tinggi maklumat lokasi dalam masa nyata, saat ini terdapat kesulitan teknikal yang besar dalam penggunaan UAV. Kelebihan terbesar dari ppklebih RTK adakah ia dapat diproses setelah fakta, dan dapat diterbalikkan penyaringan (terbalik Kalman saringan), yang dapat menyelesaikan masalah beberapa satelit kehilangan kunci, dan meningkatkan ketepatan kedudukan melalui peleburan dan terbalik
teknologi ppk adalah penentuan kedudukan spatial teknologi. Dengan pengembangan teknologi, lebih sesuai untuk pemasangan di drone. UAV teknologi menjadi semakin matang matang. operasi berskala besar lebih cekap daripada tradisional RTK ukuran. teknologi ppk jelas mempunyai prospek pembangunan yang luas dalam bidang drone. teknologi ppk pasti akan menjadi tulang belakang drone dalam tinjauan dan pemetaan.
Wellhope pembuatan tanpa wayar yang berpusat di 5G 4G; MIMO; GNSS antena drone ; GSM; 3G; Wlan; LTE antena dan rf pigtail kabel; lebih banyak pertanyaan atau pertanyaan sila hantarkan e-mel; wh@wellhope-wireless.com.











